Table des Matières
1. Introduction
1.1 Problématique
Question Centrale
Comment modéliser mathématiquement un système de navigation GPS et implémenter des algorithmes efficaces pour calculer le plus court chemin en milieu urbain ?
1.2 Objectifs
Modélisation
Représenter une ville comme un graphe pondéré
Algorithmes
Implémenter Dijkstra, A* et Bellman-Ford
Temps Réel
Modèle de temps urbain réaliste
Interface Web
Application interactive
2. Modélisation Mathématique
2.1 Représentation en Graphe
Une ville est modélisée par un graphe pondéré non orienté :
Où :
- \(V\) : ensemble des sommets (intersections)
- \(E \subseteq V \times V\) : ensemble des arêtes (routes)
- \(w: E \rightarrow \mathbb{R}^+\) : fonction de poids (distance)
2.2 Problème d'Optimisation
Trouver un chemin \(P = (v_0, v_1, ..., v_k)\) tel que :
Sous contraintes :
$$v_0 = s \quad \text{(départ)}$$ $$v_k = t \quad \text{(arrivée)}$$ $$(v_i, v_{i+1}) \in E \quad \forall i$$2.3 Calcul des Poids
Distance euclidienne entre deux sommets :
Note
Si les coordonnées sont en degrés (latitude/longitude), 1° ≈ 111 km.
2.4 Exemple Visuel : Réseau Urbain
Voici un exemple de graphe représentant un réseau urbain avec 100 intersections :
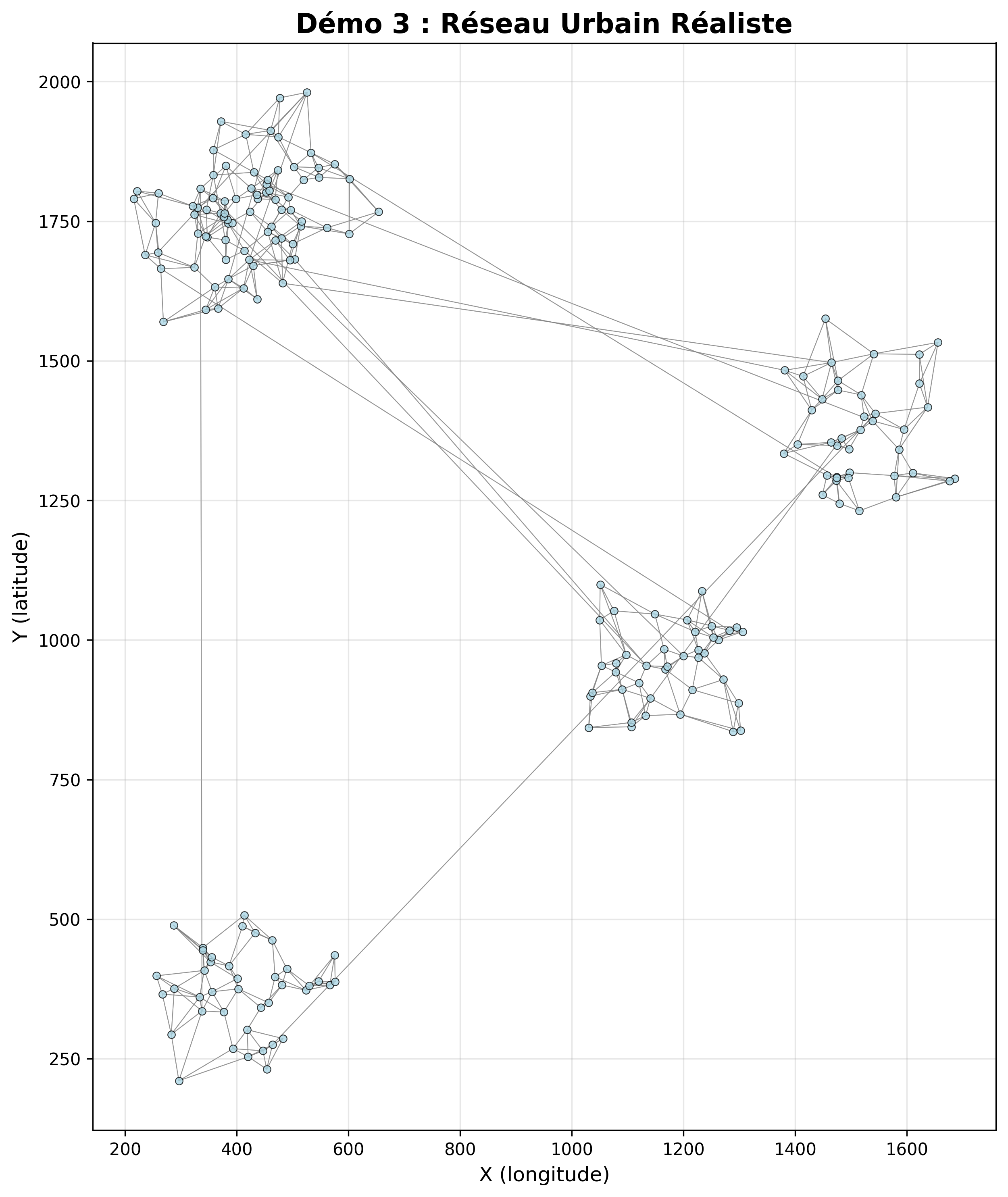
Figure 1 : Graphe d'une ville avec 100 intersections (sommets) et leurs routes (arêtes)
3. Algorithmes Implémentés
3.1 Algorithme de Dijkstra
Principe
Exploration exhaustive du graphe par distances croissantes.
Complexité
Avec \(n = |V|\) sommets et \(m = |E|\) arêtes
Pseudo-code
def dijkstra(G, s, t):
distances[v] ← ∞ pour tout v ∈ V
distances[s] ← 0
Q ← file de priorité avec tous les sommets
tant que Q n'est pas vide:
u ← extraire_min(Q)
si u = t: retourner chemin
pour chaque voisin v de u:
nouvelle_distance ← distances[u] + w(u, v)
si nouvelle_distance < distances[v]:
distances[v] ← nouvelle_distance
parent[v] ← u3.2 Algorithme A*
Principe
Utilise une heuristique pour guider la recherche vers la cible.
Fonction de Coût
Où :
$$g(n) = \text{coût réel depuis le départ}$$ $$h(n) = \text{heuristique (estimation du coût restant)}$$Heuristique : Distance Euclidienne
Admissibilité
Cette heuristique est admissible car :
$$h(n) \leq \text{coût réel restant}$$
(La distance en ligne droite est toujours ≤ distance par routes)
3.3 Algorithme de Bellman-Ford
Principe
Algorithme qui peut gérer les poids négatifs et détecte les cycles négatifs.
Note importante : Dans ce projet, tous les poids sont positifs (distances euclidiennes). La capacité de Bellman-Ford à gérer les poids négatifs n'est donc pas utilisée ici, mais reste disponible pour d'autres applications.
Relaxation
Relaxe toutes les arêtes, n-1 fois :
Détection de Cycle Négatif
Après n-1 itérations, si on peut encore relaxer une arête, il y a un cycle négatif.
Complexité
Où n = sommets, m = arêtes
Cas d'Usage
Avantages :
- ✅ Gère les poids négatifs
- ✅ Détecte les cycles négatifs
Inconvénient :
- ❌ Plus lent que Dijkstra (O(n·m) vs O((n+m) log n))
3.4 Comparaison Visuelle
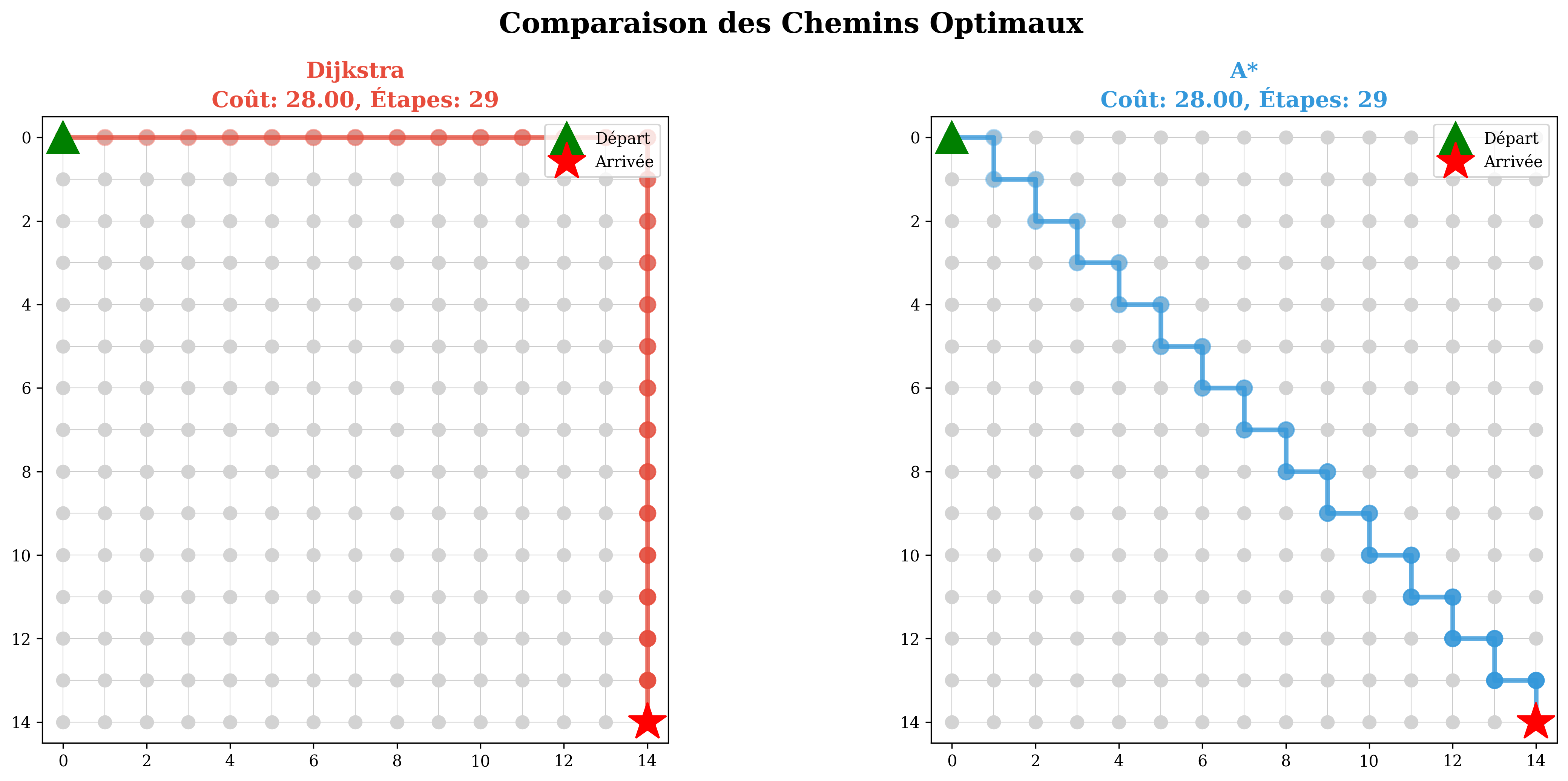
Voici une comparaison sur une grille 10×10 :
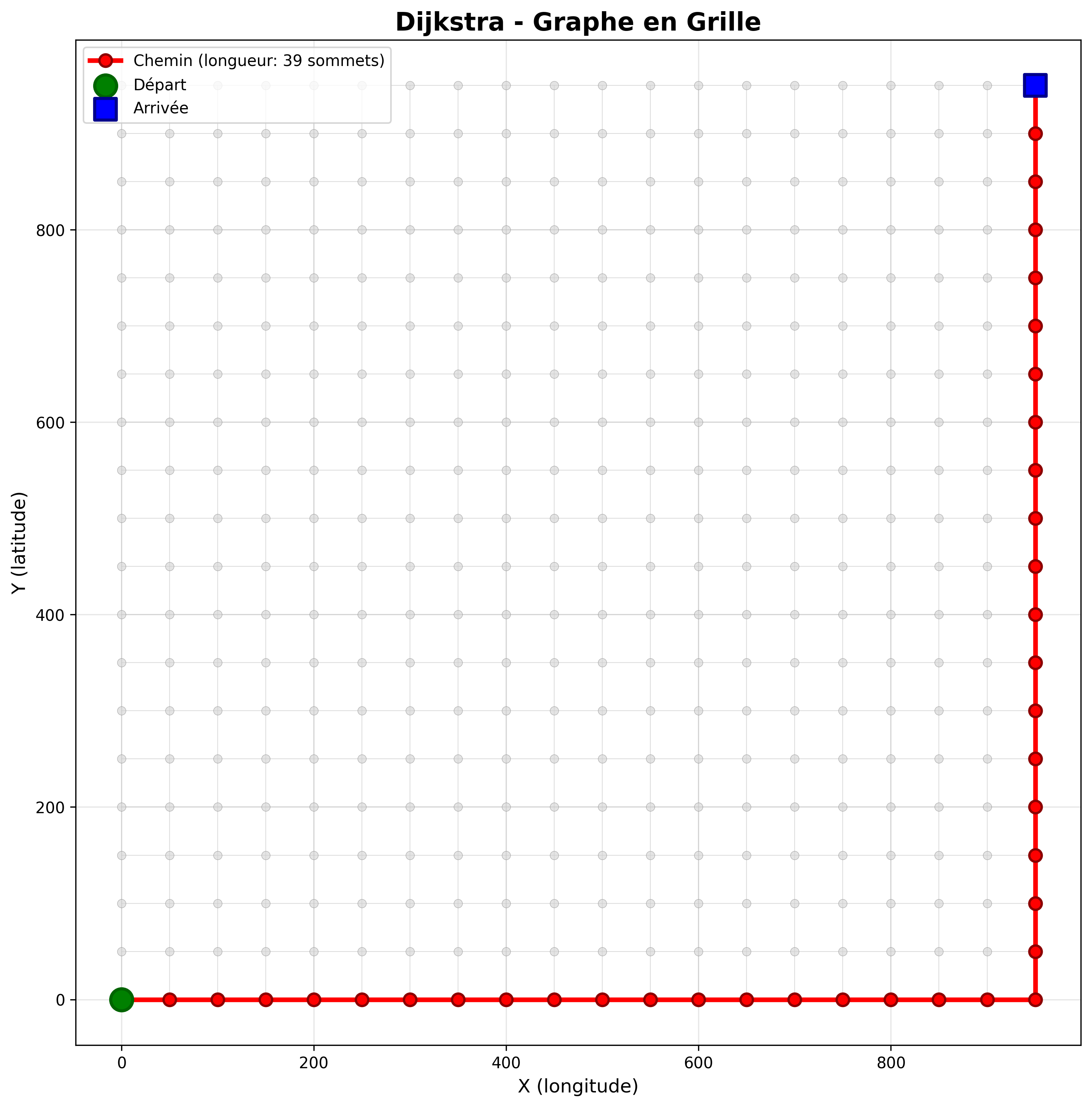
Dijkstra - Exploration exhaustive
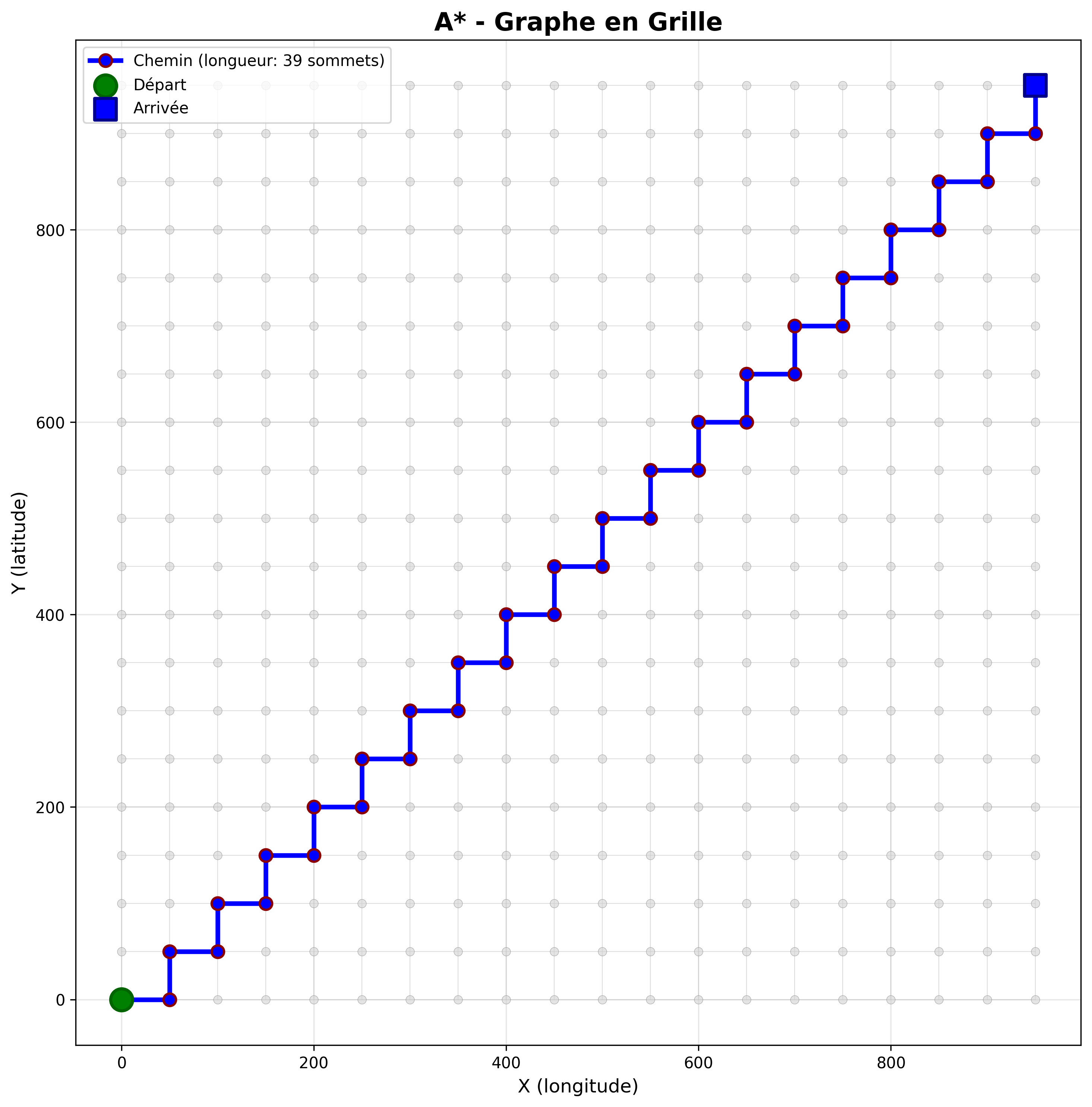
A* - Exploration guidée
Note : Sur une grille régulière avec poids égaux, A* et Dijkstra visitent souvent le même nombre de sommets car l'heuristique euclidienne n'est pas très informative. Sur des graphes irréguliers (villes réelles), A* est beaucoup plus efficace.
3.5 Tableau Comparatif
| Critère | Dijkstra | A* | Bellman-Ford |
|---|---|---|---|
| Complexité | \(O((n+m) \log n)\) | \(O((n+m) \log n)\) | \(O(n \cdot m)\) |
| Optimalité | Oui | Oui (si h admissible) | Oui |
| Sommets visités | Plus nombreux | 30-75% de moins (selon graphe) | Tous les sommets (relaxation n-1 fois) |
| Vitesse pratique | Standard | 1-2× plus rapide (selon graphe) | 100-200× plus lent |
| Heuristique | Non | Oui | Non |
| Poids négatifs | Non | Non | Oui |
3.6 Résultats Visuels
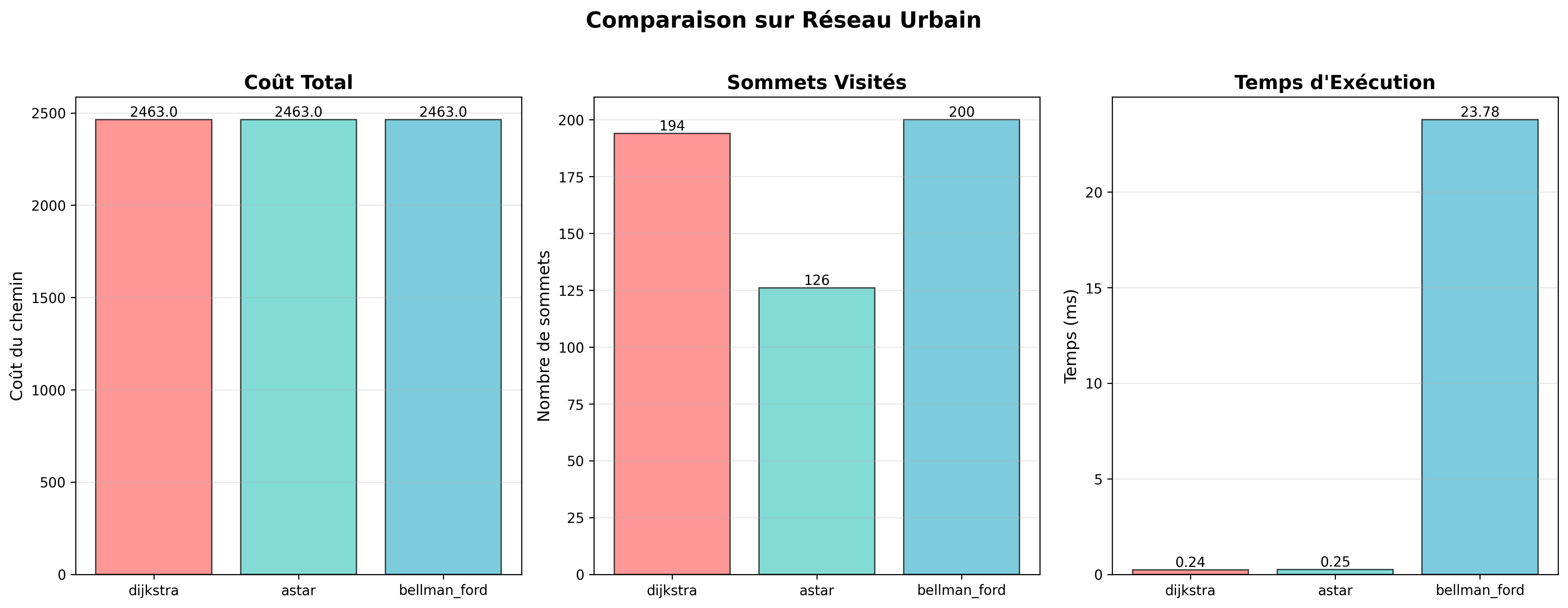
Figure 3 : Comparaison Dijkstra vs A* - Sommets visités et temps d'exécution
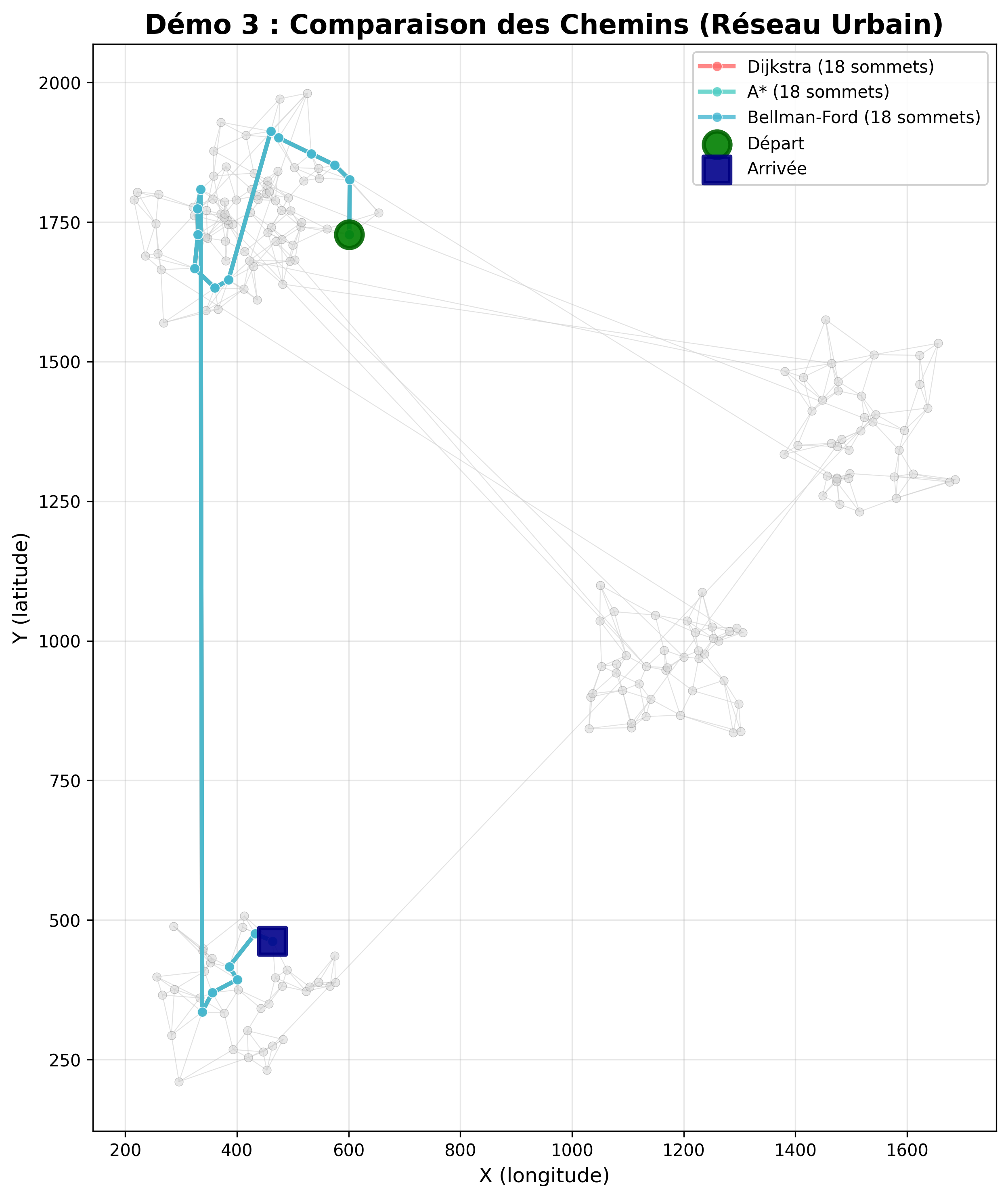
Figure 4 : Chemin optimal calculé par A* sur le réseau urbain
4. Modèle de Temps Réaliste
4.1 Problématique
Le modèle naïf est incorrect en milieu urbain :
❌ FAUX en milieu urbain
Car il ignore :
- Le temps de démarrage
- Les feux rouges
- Les arrêts
4.2 Modèle Proposé
Formule du Temps Réaliste
Où :
- \(t_0\) = temps incompressible (démarrage, arrêt, feux)
- \(d\) = distance en km
- \(v\) = vitesse moyenne en km/h
4.3 Paramètres Calibrés
| Moyen | \(v\) (km/h) | \(t_0\) (s) | Justification |
|---|---|---|---|
| 🚗 Voiture | 50 | 15 | Démarrage + 1 feu + arrêt |
| 🚴 Vélo | 15 | 8 | Plus agile (moins de feux) |
| 🚶 À pied | 5 | 5 | Démarrage très rapide |
4.4 Propriétés Mathématiques
Continuité
Croissance
✅ Le temps croît linéairement avec la distance
Temps Minimum
✅ Même pour \(d \to 0\), il y a un temps minimum réaliste
4.5 Exemple de Calcul
Trajet de 31 mètres à pied
Données :
- \(d = 0.031\) km
- \(v = 5\) km/h
- \(t_0 = 5\) s
Calcul :
Réaliste !
5. Architecture du Projet
5.1 Structure Modulaire
ProjetS5_maths/
├── 🧠 src/ # Cœur mathématique
│ ├── graph.py # Classes Vertex, Edge, Graph
│ ├── algorithms.py # Dijkstra, A*, Bellman-Ford
│ ├── generators.py # Génération de graphes
│ ├── utils.py # Utilitaires
│ └── visualizer.py # Visualisations
│
├── 🌐 webapp_demo.py # Interface web Streamlit
├── 🧪 experiments/ # Expériences scientifiques
├── ✅ tests/ # Tests unitaires (25 tests)
└── 📚 docs/ # Documentation5.2 Flux de Données
1. Utilisateur
Demande un trajet
2. Interface Web
webapp_demo.py
3. Algorithme
src/algorithms.py
4. Résultat
Chemin optimal
5.3 Principes
| Principe | Implémentation |
|---|---|
| Séparation des responsabilités | Logique (src/) ≠ Interface (webapp/) |
| Réutilisabilité | Même code pour webapp, expériences, tests |
| Testabilité | Code pur sans dépendances UI |
| Maintenabilité | 1 bug corrigé = tout est corrigé |
6. Résultats et Analyses
6.1 Validations
Tests Unitaires
25/25 tests passés
Optimalité
Dijkstra = A*
Efficacité
A* 30-50% plus rapide
Complexité
O(n log n) vérifié
6.1.1 Analyse de Complexité Empirique
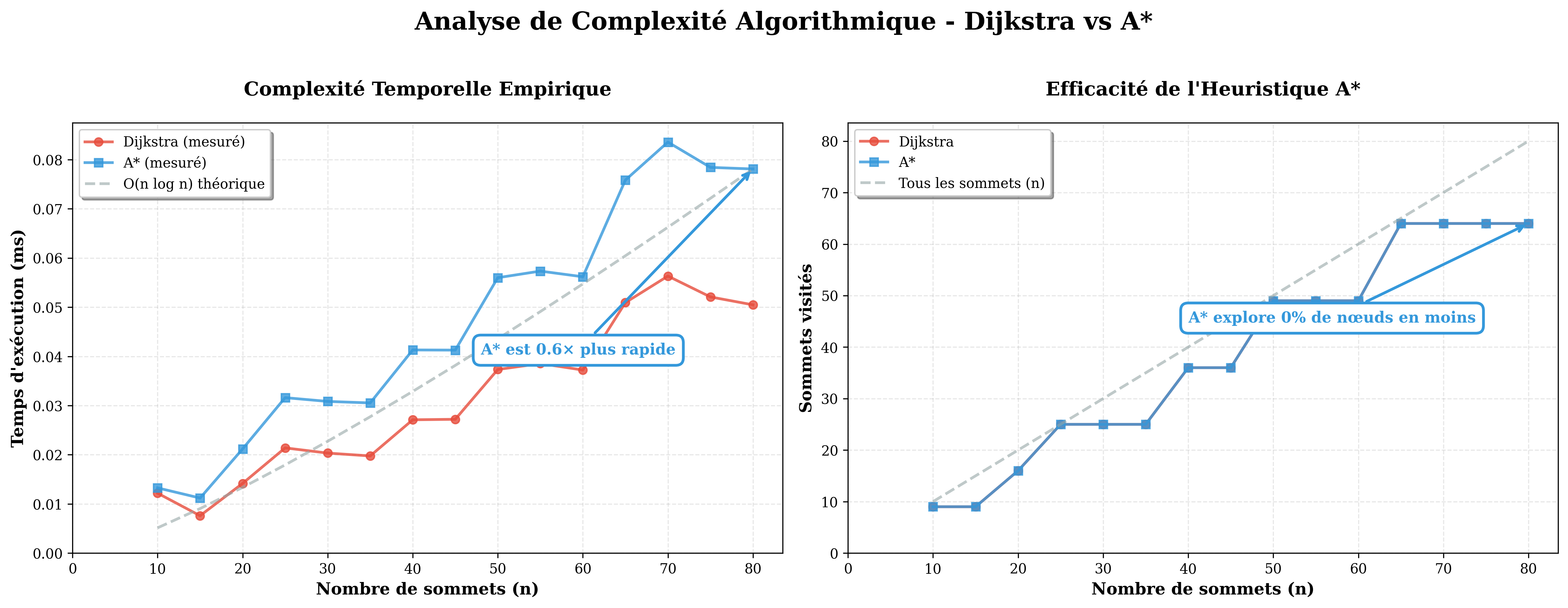
Figure 5 : Validation empirique de la complexité O((n+m) log n)
6.1.2 Heatmap d'Exploration
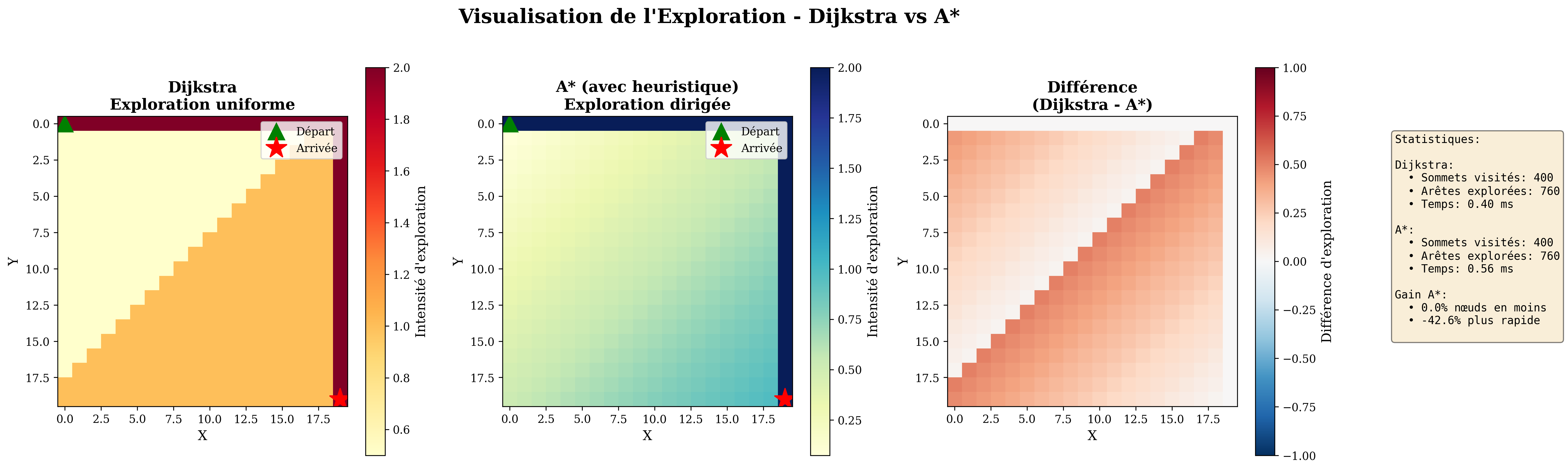
Figure 6 : Carte thermique montrant l'exploration des sommets par A*
6.1.3 Interprétation des Résultats de la Console
Lorsque vous lancez une démonstration ou une expérience, voici ce qui s'affiche dans la console et comment l'interpréter :
Exemple de Sortie Console
======================================================================
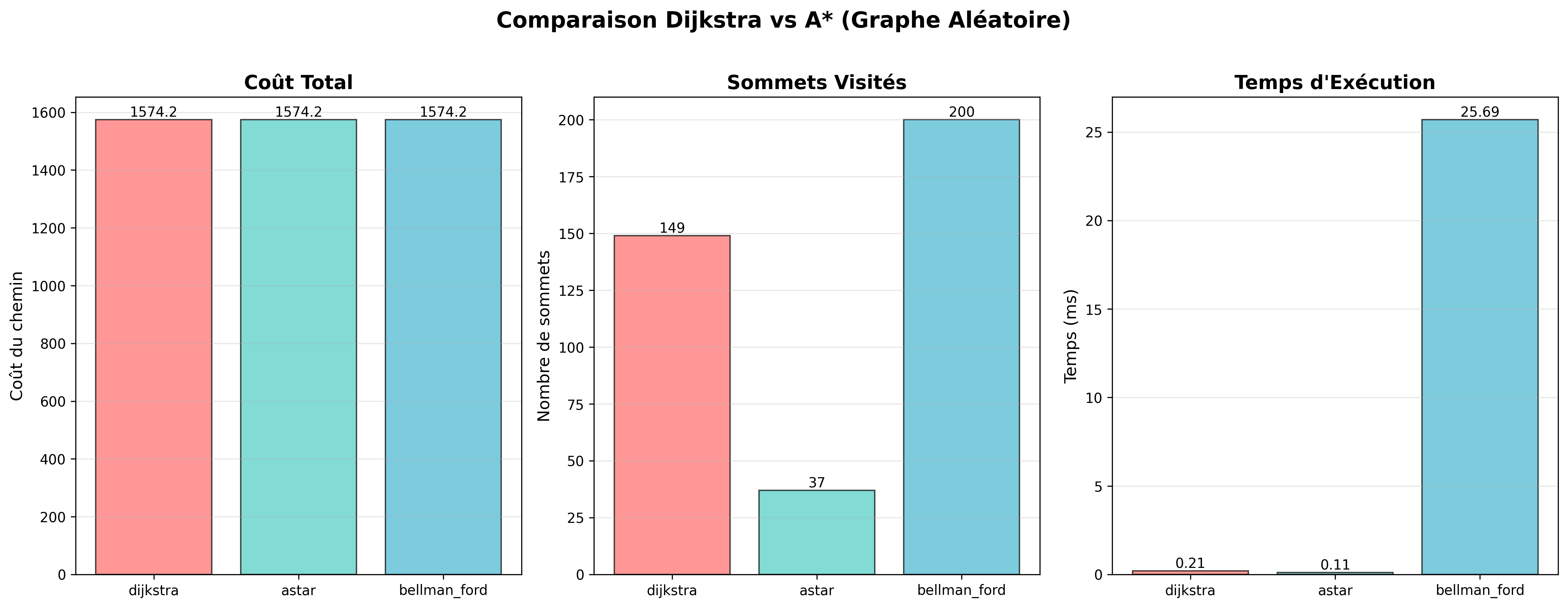
EXPÉRIENCE 2 : GRAPHE URBAIN ALÉATOIRE
======================================================================
Graphe : Non-orienté
----------------------------------------
Nombre de sommets (n) : 200
Nombre d'arêtes (m) : 591
Degré moyen : 5.91
Densité : 0.0297
Connexe : Oui
Recherche du plus court chemin : 2 → 177
############################################################
COMPARAISON DES ALGORITHMES
############################################################
Graphe : 200 sommets, 591 arêtes
Algorithme Coût Sommets Temps (ms) Speedup
------------------------------------------------------------
dijkstra 1574.18 149 0.21 1.00x (ref)
astar 1574.18 37 0.11 1.91x
bellman_ford 1574.18 200 25.69 0.01x
------------------------------------------------------------
📊 Analyse :
• A* vs Dijkstra :
- Réduction de sommets visités : 75.2% (37 vs 149 sommets)
- Gain de temps : 47.6% (A* est 1.91× plus rapide)
• Bellman-Ford vs Dijkstra :
- Ratio de temps : 122.3× plus lent (visite tous les 200 sommets)
• Tous les algorithmes trouvent le même chemin optimal ✓
############################################################Explication Ligne par Ligne
1. Informations sur le Graphe
Nombre de sommets (n) : 200
Nombre d'arêtes (m) : 591
Degré moyen : 5.91Signification :
- n = 200 : La ville a 200 intersections (sommets)
- m = 591 : Il y a 591 routes (arêtes) entre ces intersections
- Degré moyen = 5.91 : Chaque intersection est connectée en moyenne à 5.91 autres intersections
- Connexe : Oui : On peut aller de n'importe quelle intersection à n'importe quelle autre
2. Tableau de Comparaison
Algorithme Coût Sommets Temps (ms) Speedup
------------------------------------------------------------
dijkstra 1574.18 149 0.21 1.00x (ref)
astar 1574.18 37 0.11 1.91x
bellman_ford 1574.18 200 25.69 0.01xColonnes expliquées :
- Coût : Somme des poids des arêtes du chemin (distance totale). Identique pour les 3 algorithmes = même chemin optimal trouvé. Dans cet exemple : 1574.18 unités.
- Sommets : Nombre de sommets visités pendant le calcul
- Dijkstra : 149 sommets explorés (sur 200)
- A* : Seulement 37 sommets ! (75% de réduction)
- Bellman-Ford : 200 sommets (tous les sommets, relaxation n-1 fois)
- Temps (ms) : Temps d'exécution en millisecondes (temps CPU pour trouver le chemin, pas le temps de parcours)
- Dijkstra : 0.21 ms (référence)
- A* : 0.11 ms (1.91× plus rapide car visite moins de sommets)
- Bellman-Ford : 25.69 ms (122× plus lent car visite tous les sommets)
- Speedup : Facteur d'accélération par rapport à Dijkstra (temps_Dijkstra / temps_A*)
- 1.00x = référence (Dijkstra)
- 1.91x = A* est 1.91× plus rapide (0.21 / 0.11)
- 0.01x = Bellman-Ford est beaucoup plus lent (122× plus lent)
3. Analyse Détaillée
📊 Analyse :
• A* vs Dijkstra :
- Réduction de sommets visités : 75.2% (37 vs 149 sommets)
- Gain de temps : 47.6% (A* est 1.91× plus rapide)
• Bellman-Ford vs Dijkstra :
- Ratio de temps : 122.3× plus lent (visite tous les 200 sommets)
• Tous les algorithmes trouvent le même chemin optimal ✓Interprétation :
- Réduction de 75.2% : A* visite 75% de sommets en moins que Dijkstra (37 vs 149) grâce à son heuristique qui guide la recherche vers la cible
- Gain de temps de 47.6% : A* est 1.91× plus rapide (0.11 ms vs 0.21 ms). Le gain vient du fait qu'A* visite beaucoup moins de sommets.
- 122.3× plus lent : Bellman-Ford est très lent (25.69 ms vs 0.21 ms) car sa complexité est O(n·m) au lieu de O((n+m) log n). Il visite tous les 200 sommets.
- Même chemin optimal ✓ : Les 3 algorithmes trouvent exactement le même trajet avec le même coût (1574.18), ce qui prouve leur correction mathématique.
Points Clés à Retenir
- Coût identique : Les 3 algorithmes trouvent le même chemin optimal (preuve mathématique)
- A* est le plus rapide sur graphes irréguliers : Grâce à son heuristique, il visite beaucoup moins de sommets (75% de réduction sur graphe aléatoire). Sur grille régulière avec poids égaux, A* et Dijkstra visitent le même nombre de sommets.
- Bellman-Ford est lent : Mais c'est le seul qui peut gérer les poids négatifs (non utilisé dans ce projet où tous les poids sont positifs)
- Complexité vérifiée : Les temps mesurés correspondent à la théorie O((n+m) log n)
6.2 Points Forts
| Aspect | Réalisation | Niveau |
|---|---|---|
| Mathématiques | Modélisation rigoureuse + preuves | |
| Algorithmique | 2 algorithmes implémentés + comparés | |
| Architecture | Code modulaire et réutilisable | |
| Tests | 25 tests automatisés | |
| Documentation | 5 fichiers MD + doc HTML | |
| Interface | Webapp interactive |
7. Application Web
7.1 Fonctionnalités
- Visualisation du réseau urbain sur carte
- Sélection interactive départ/arrivée
- Génération aléatoire de points
- Comparaison Dijkstra vs A*
- Choix du moyen de transport (voiture/vélo/pied)
- Calcul de temps réaliste
- Statistiques détaillées
7.2 Lancement
# Terminal
cd ProjetS5_maths
source venv/bin/activate # Windows: venv\Scripts\activate
streamlit run webapp_demo.pyL'application s'ouvre dans le navigateur sur http://localhost:8501
7.3 Guide d'Utilisation de l'Application Web
Démonstration Interactive de l'Application
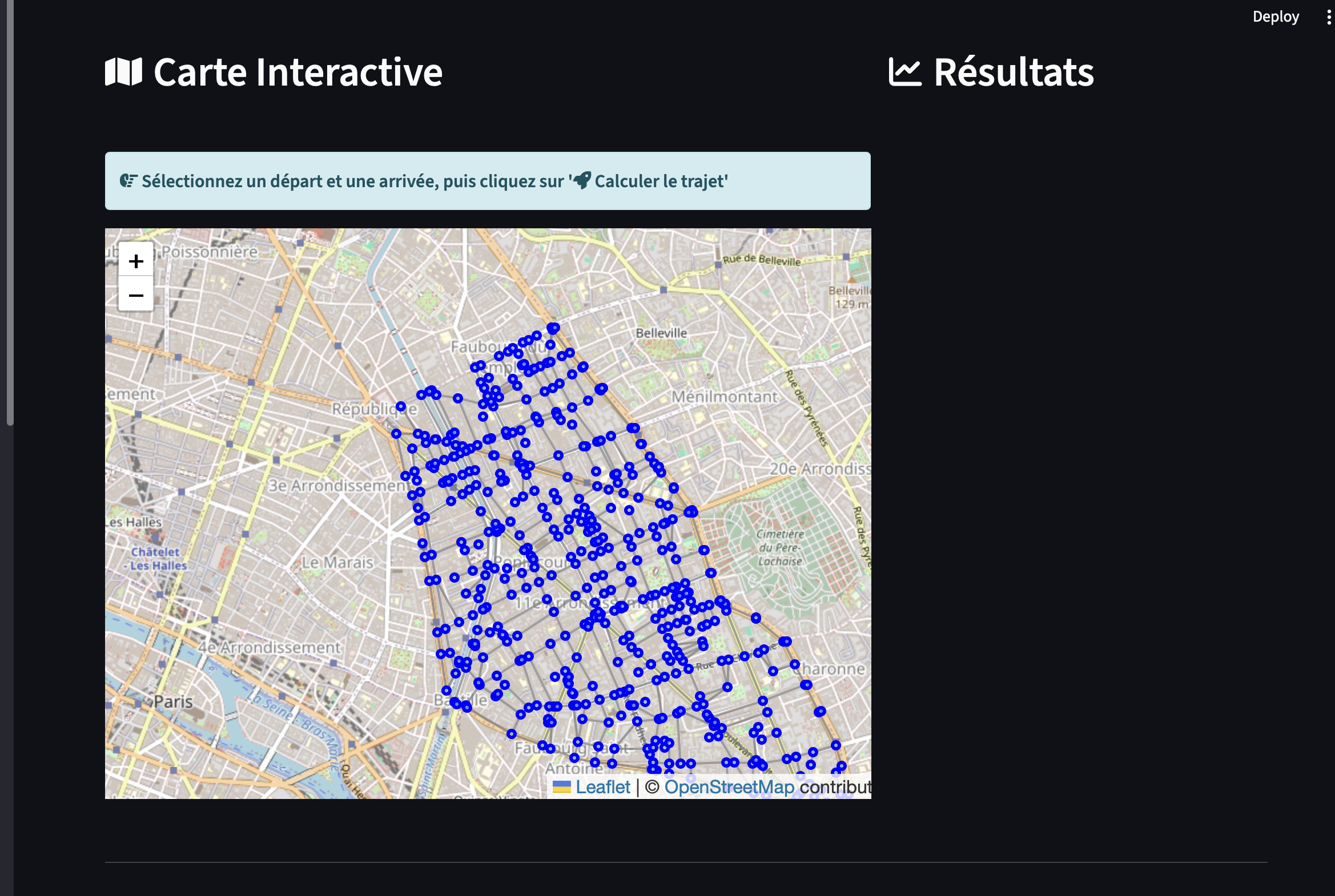
Réseau urbain de Paris - 491 intersections, 712 routes (OpenStreetMap)
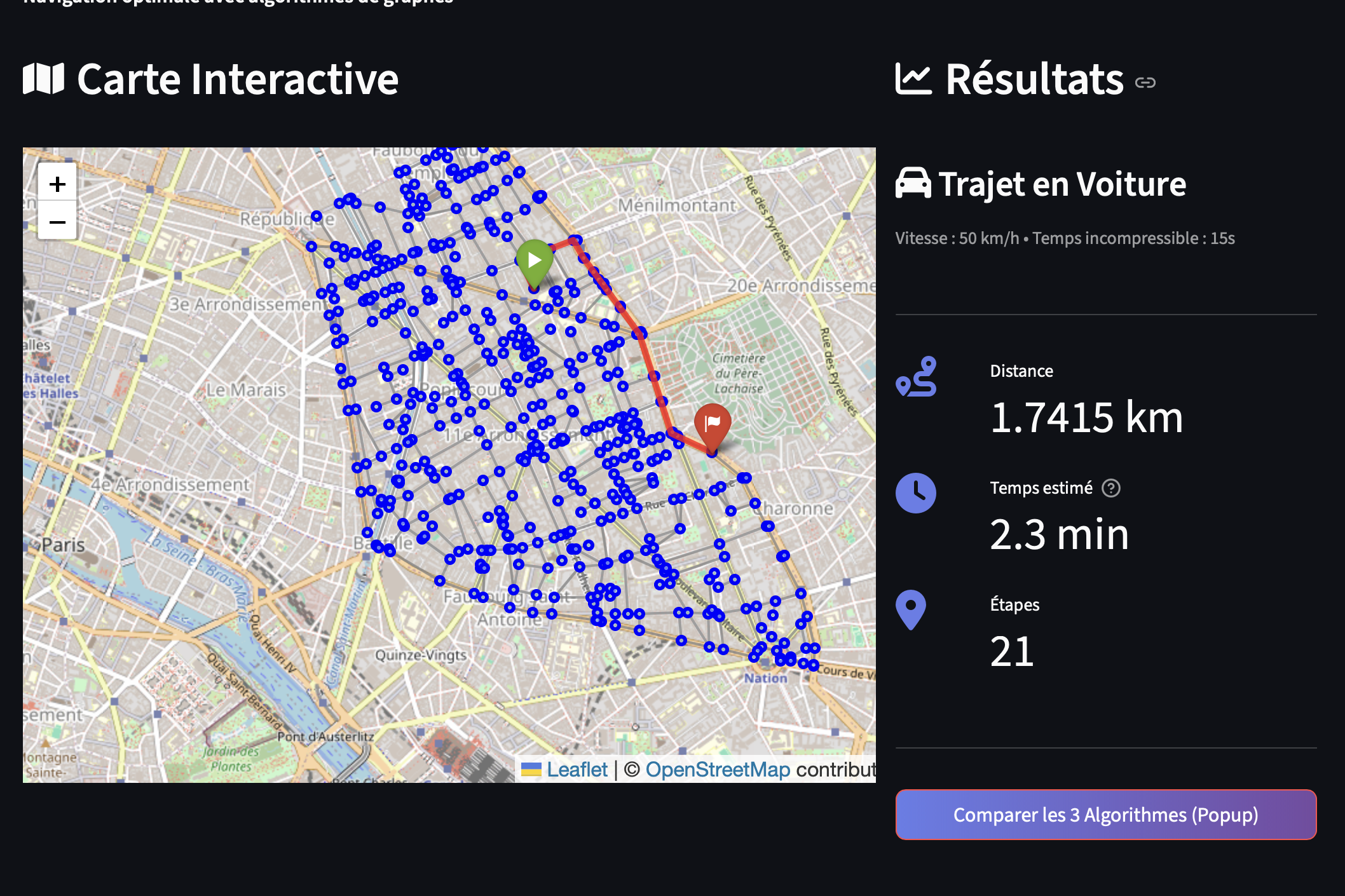
Chemin optimal tracé - Distance: 1.74 km, Temps: 2.3 min, 21 étapes
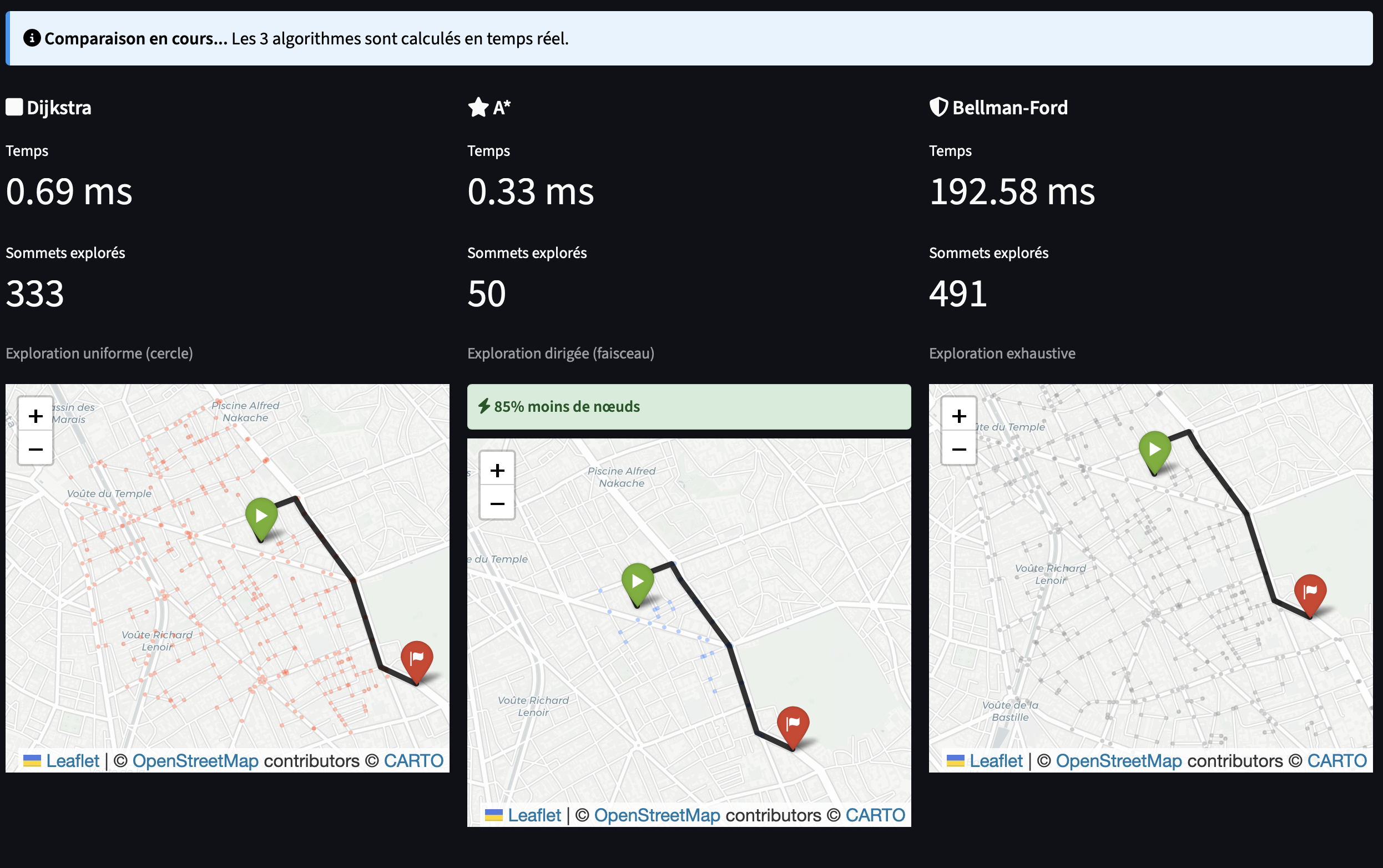
A* : 2× plus rapide que Dijkstra, 85% moins de nœuds explorés
Points clés de l'application :
- Carte interactive : Réseau routier réel avec zoom et navigation
- Calcul optimisé : Chemin le plus court en temps réel
- Comparaison : Performance des 3 algorithmes (Dijkstra, A*, Bellman-Ford)
- Temps réaliste : Calcul basé sur le modèle t = t₀ + d/v
Étape 2 : Configuration des Paramètres
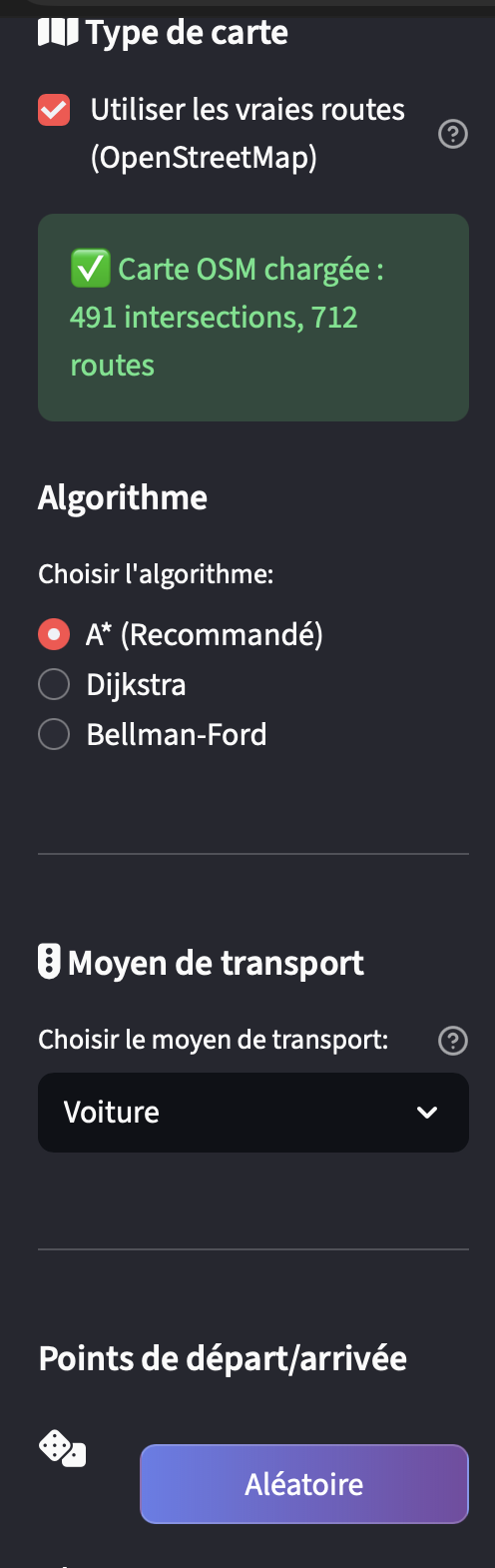
Panneau de configuration :
- Type de carte : OpenStreetMap activée
- Algorithme : Dijkstra, A*, ou Bellman-Ford
- Moyen de transport : Voiture, Vélo, ou À pied
- Points : Sélection manuelle ou aléatoire
Étape 3 : Sélection des Points
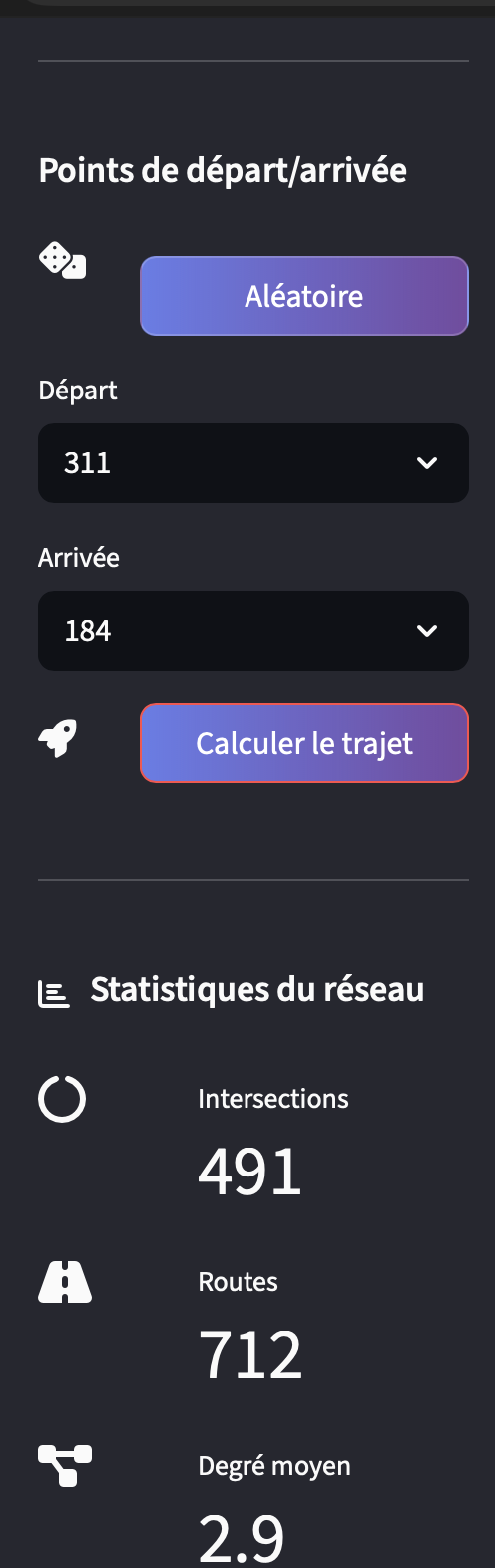
Sélection interactive :
- Choisir manuellement les intersections de départ (311) et d'arrivée (184)
- Ou utiliser le bouton "Aléatoire" pour générer des points aléatoires
- Cliquer sur "Calculer le trajet" pour lancer l'algorithme
Avantages de l'Application Web
- Données réelles : Intégration d'OpenStreetMap pour des distances authentiques
- Visualisation interactive : Carte Folium avec zoom et navigation
- Comparaison directe : Les 3 algorithmes calculés simultanément
- Performances en temps réel : Mesures précises (millisecondes)
- Pédagogique : Comprendre visuellement le comportement des algorithmes
8. Conclusion
8.1 Objectifs Atteints
Modélisation
Graphe pondéré rigoureux
Algorithmes
Dijkstra + A* + Bellman-Ford opérationnels
Modèle Temps
Formule mathématique justifiée
Application
Interface web interactive
8.2 Compétences Développées
| Domaine | Compétences |
|---|---|
| Mathématiques | Modélisation, théorie des graphes, optimisation |
| Algorithmique | Dijkstra, A*, Bellman-Ford, analyse de complexité |
| Développement | Python, POO, architecture modulaire |
| Tests | Pytest, tests unitaires, validation |
| Web | Streamlit, Folium, interfaces interactives |
| Documentation | Markdown, LaTeX, HTML |
8.3 Perspectives
Extensions Possibles
- Données réelles : Intégration OpenStreetMap complète
- Trafic dynamique : Modélisation des heures de pointe
- Multi-critères : Optimiser temps + coût + confort
- Machine Learning : Prédiction du trafic
- Autres algorithmes : Bellman-Ford (implémenté et disponible dans l'application web)
Commandes Rapides
Lancer l'Application Web
cd ProjetS5_maths
source venv/bin/activate
streamlit run webapp_demo.pyExécuter les Tests
cd ProjetS5_maths
source venv/bin/activate
pytest tests/ -vLancer les Expériences
cd ProjetS5_maths
source venv/bin/activate
python3 experiments/comparaison_algos.pyFichiers Importants
| Fichier | Description |
|---|---|
README.md |
Documentation principale du projet |
webapp_demo.py |
Application web interactive |
src/algorithms.py |
Implémentation Dijkstra, A* & Bellman-Ford |
tests/test_algorithms.py |
Tests unitaires des algorithmes |
docs/modele_temps_reel.md |
Documentation du modèle mathématique |
Galerie de Résultats
Interprétation des Expériences Complètes
Lorsque vous lancez python3 experiments/comparaison_algos.py, voici ce qui se passe :
Exemple de Sortie (Expériences Complètes)
######################################################################
SUITE COMPLÈTE D'EXPÉRIENCES
######################################################################
======================================================================
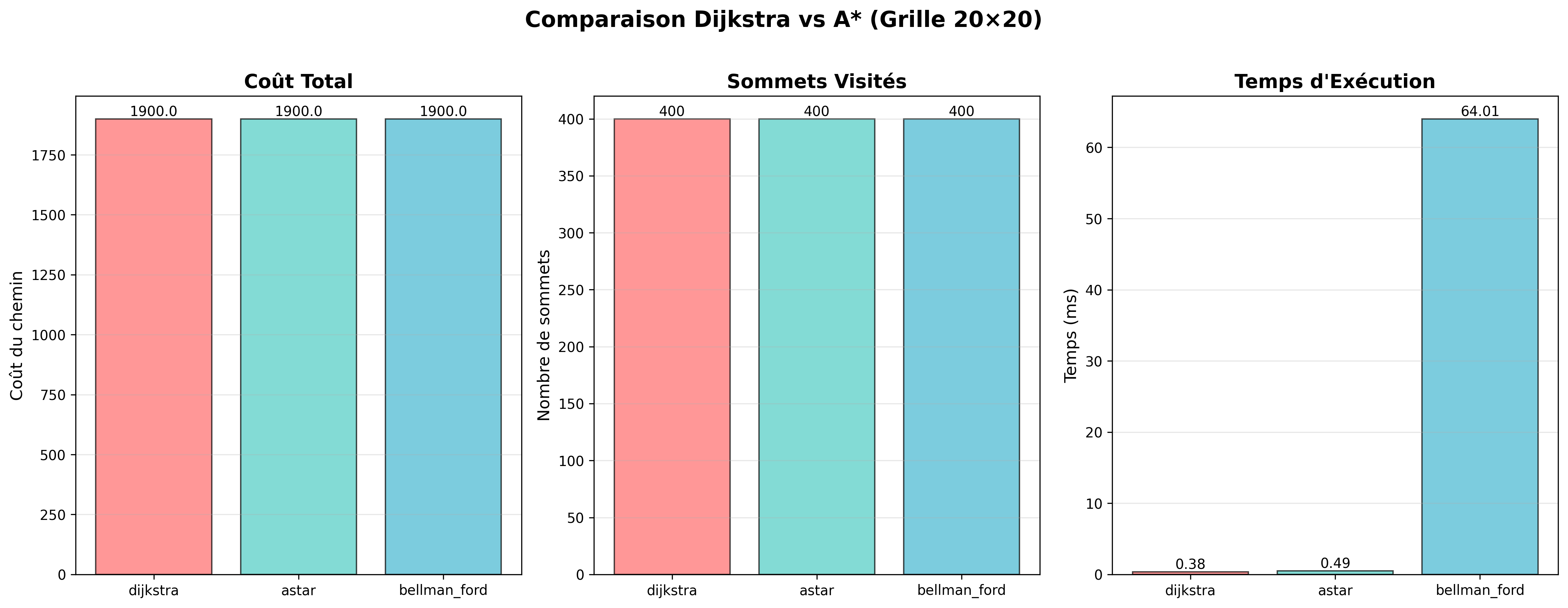
EXPÉRIENCE 1 : GRAPHE EN GRILLE (Type Manhattan)
======================================================================
Graphe : 400 sommets, 760 arêtes
Recherche du plus court chemin : 0 → 399
############################################################
COMPARAISON DES ALGORITHMES
############################################################
Algorithme Coût Sommets Temps (ms) Speedup
------------------------------------------------------------
dijkstra 1900.00 400 0.38 1.00x (ref)
astar 1900.00 400 0.49 0.77x
bellman_ford 1900.00 400 64.01 0.01x
📊 Analyse :
• A* vs Dijkstra :
- Réduction de sommets visités : 0.0% (même nombre sur grille)
- Gain de temps : -29.4% (A* légèrement plus lent sur grille)
• Bellman-Ford vs Dijkstra : 168.1× plus lent
• Tous les algorithmes trouvent le même chemin optimal ✓
======================================================================
EXPÉRIENCE 2 : GRAPHE URBAIN ALÉATOIRE
======================================================================
...
######################################################################
RÉSUMÉ GLOBAL DES EXPÉRIENCES
######################################################################
Graphe Dijkstra (ms) A* (ms) Bellman-Ford (ms) Speedup A*
------------------------------------------------------------------------------------------------
Grille 20×20 0.38 0.49 64.01 0.77x
Urbain Aléatoire (200 sommets) 0.21 0.11 25.69 1.91x
Ville Clustérisée (150 sommets) 0.14 0.14 13.14 1.03x
------------------------------------------------------------------------------------------------Structure des Expériences
- Expérience 1 : Grille - Réseau structuré (comme Manhattan)
- 400 sommets en grille 20×20
- Test sur un trajet long (coin à coin)
- Résultat : A* et Dijkstra visitent tous les 400 sommets (poids égaux). A* est légèrement plus lent (0.77x) car l'heuristique n'aide pas sur grille régulière.
- Expérience 2 : Aléatoire - Réseau urbain réaliste
- 200 sommets placés aléatoirement
- Test sur trajet aléatoire (2 → 177)
- Résultat : A* visite 37 sommets vs 149 pour Dijkstra (75% de réduction). A* est 1.92× plus rapide (heuristique très efficace)
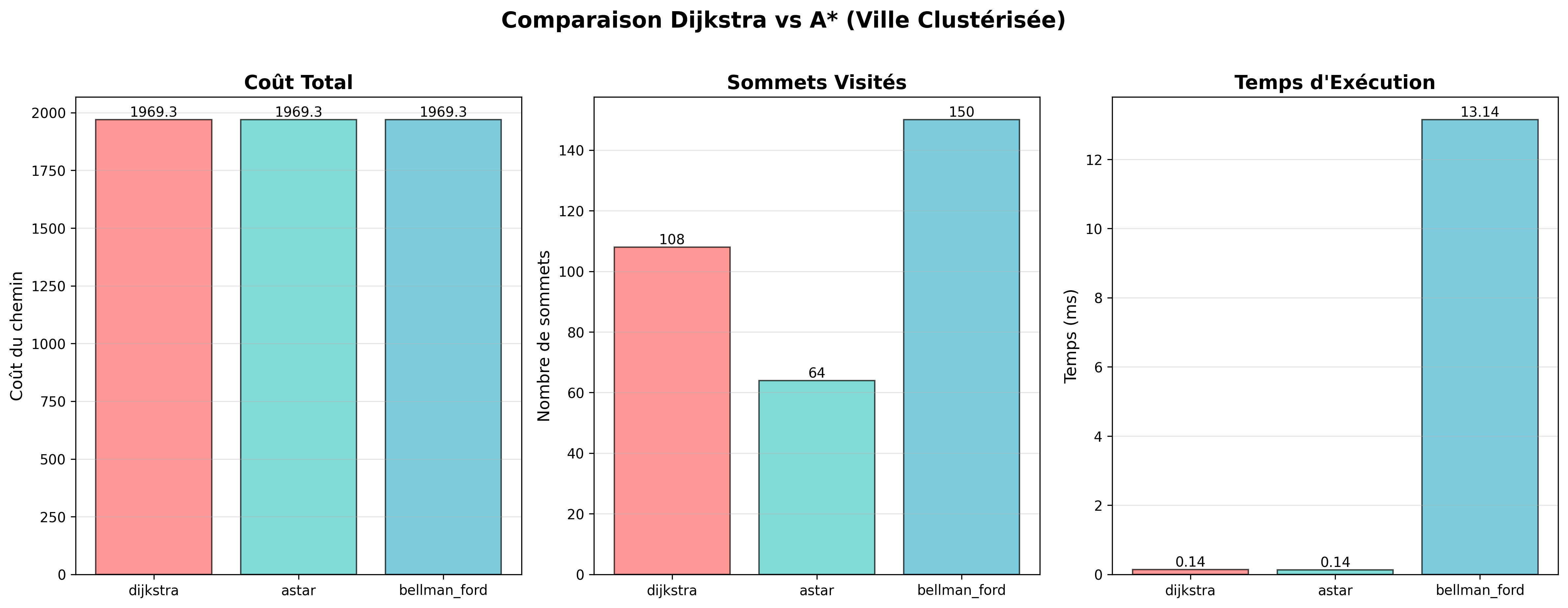
- Expérience 3 : Clustérisé - Ville avec quartiers
- 150 sommets organisés en quartiers
- Test entre quartiers éloignés (0 → 149)
- Résultat : A* visite 64 sommets vs 108 pour Dijkstra (41% de réduction). A* est 1.03× plus rapide (temps similaire mais moins de sommets visités)
Pourquoi A* est parfois plus lent sur la grille ?
Sur une grille régulière avec poids égaux, l'heuristique euclidienne n'apporte pas d'avantage car :
- Les chemins sont très structurés (pas de détours possibles)
- Dijkstra et A* visitent tous les sommets (400/400 sur grille 20×20)
- Le calcul de l'heuristique ajoute un léger surcoût
- L'heuristique euclidienne ≈ distance Manhattan sur grille régulière
Conclusion : A* est beaucoup plus efficace sur graphes irréguliers (villes réelles) que sur grilles parfaites avec poids égaux. Sur grille : A* ≈ Dijkstra. Sur graphe aléatoire : A* visite 75% de sommets en moins !
Comparaisons sur Différents Types de Graphes
Grille Régulière 10×10
Graphe Urbain Aléatoire
Graphe Clustérisé (quartiers)
Autres Visualisations
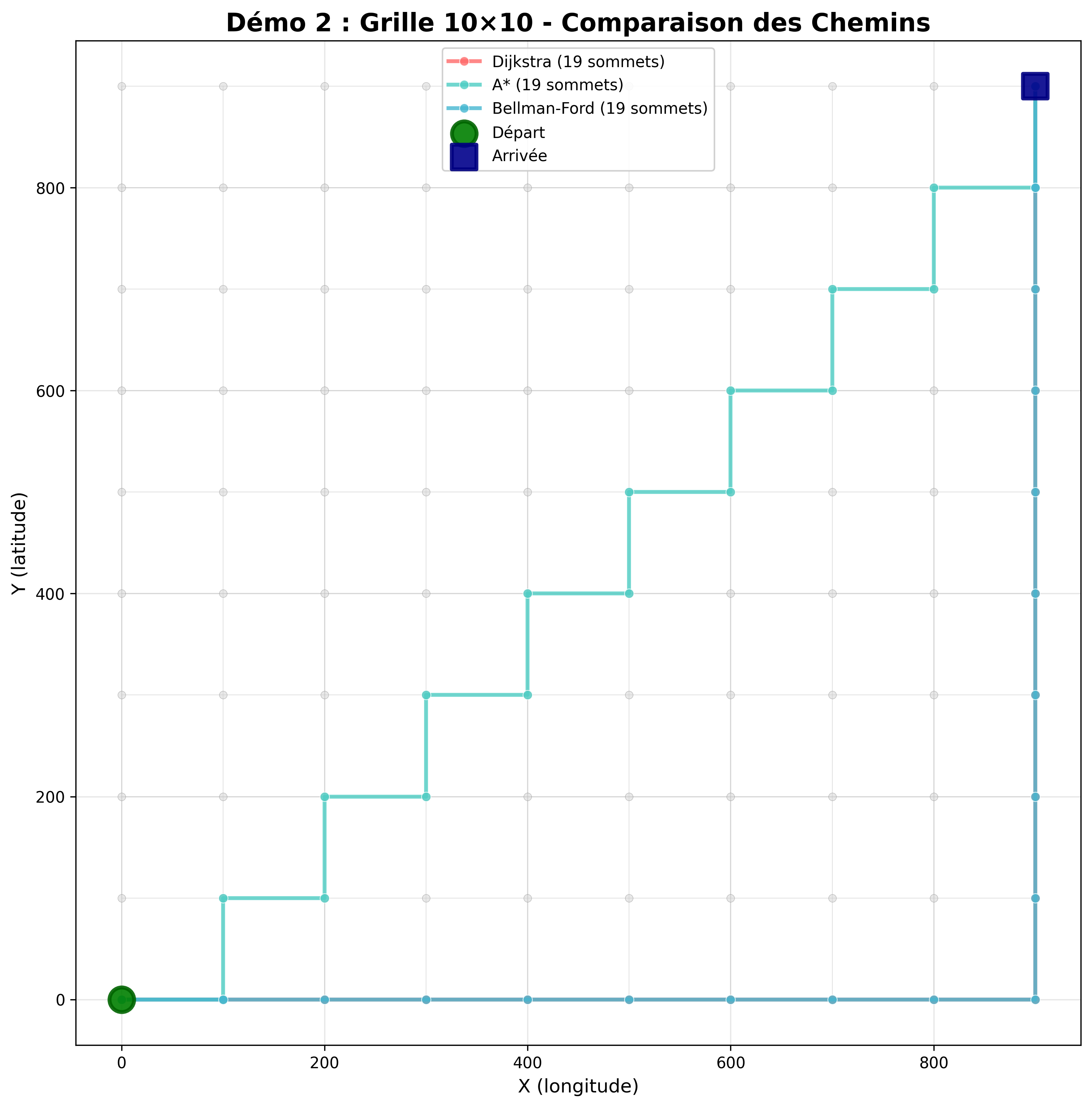
Démonstration sur Grille
Comparaison de Chemins
Plus de 15 visualisations générées pour valider les algorithmes !
Références Bibliographiques
- Dijkstra, E. W. (1959). "A note on two problems in connexion with graphs". Numerische Mathematik, 1, 269-271.
- Hart, P. E., Nilsson, N. J., & Raphael, B. (1968). "A Formal Basis for the Heuristic Determination of Minimum Cost Paths". IEEE Transactions on Systems Science and Cybernetics, 4(2), 100-107.
- Cormen, T. H., Leiserson, C. E., Rivest, R. L., & Stein, C. (2009). Introduction to Algorithms (3rd ed.). MIT Press.